第一步是評估導入的機械手臂,要用於甚麼樣的應用場合以及什麼樣的生產製程。若是製程需要在人工在旁邊由機器協同一起完成,這樣推薦使用人機混合的半自動線,特別是需要經常更換生產流程與少量多樣的情況, 協作型機械手臂會是一個很好的選項。   如果是尋找一個高速型取放料或小型物件, 並聯多連桿四軸機械手臂最適合與符合您的需求。   接下來我們將針對 多關節六軸工業用機械手臂做選型建議。這種機器手臂可以適應一個非常大範圍的應用(目前工作半徑最大可到3,900mm)。包含從高溫鍛造件取、放料到堆疊,以及噴塗,去毛邊,沖壓上下料等製程。基本上羅堎針對每一種應用製程都有相應的完整且精確的技術整合方案。您所要做的就是明確提出希望機械手臂能為您做哪個工作的需求,我們將為您規劃選擇最適合的機型。
- 有效負載
即機械手臂在其工作空間可以承受的最大工具或工件負載。從 3Kg 到 1300Kg 不等。機械手臂將目標工件或工具從一個工位移載到另一個工位,其工件或工具的重量以及機械手臂夾爪的重量要加到總工作負載。另外機器手臂的負載曲線,在空間範圍的不同距離位置,實際負載能力會有差異。
- 自由度(軸數)
機械手臂配置的軸數直接關聯其自由度。如果是針對一個簡單直線移載的場合,例如從一條輸送帶取工件到另一條輸送帶,那麼 4 軸機械手臂就足以應對。但應用場景是在一個狹窄的工作空間,且機械手臂需要很多的曲面和轉動,6 軸或 7 軸機械手臂將是最好的選擇。軸數選擇一般取決於應用場合。在成本允許的考量前提下,選擇多一點的軸數,機械手臂應用靈活性較高,且便於未來可應用到不一樣的應用製程或提升性能。機器手臂製造商定義不同的軸或關節命名- 基本上,第一關節(A1)是最接近機器人底座本體。接下來的關節稱為 A2,A3,A4,A5,A6 以依此類推,直到達手腕部末端。
 
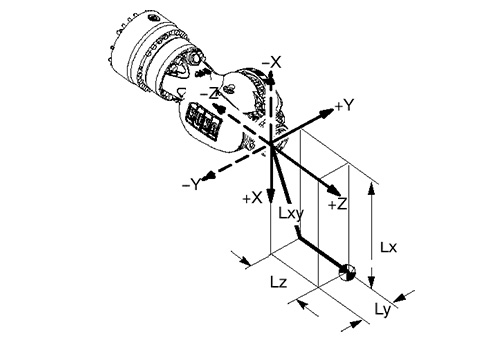
- 最大作動範圍
當評估自動化生產製程應用時,須瞭解機械手臂需要到達的最大有效工作距離。選擇一個機械手臂不是僅憑有效載荷-也需要考量它能達到的實際距離。羅堎都會給出相對應機械手臂的作動範圍建議,可以判斷,該機械手臂是否適合於適當的應用。機械手臂的運動範圍,注意機械手臂在近身及背後的非工作區域。機械手臂的最大垂直高度的量測是從手臂能到達的最低點到手腕可以達到的的最大高度的距離。最大作動距離是從機械手臂底座中心到手腕可以達到的最遠點的中心的距離。
 
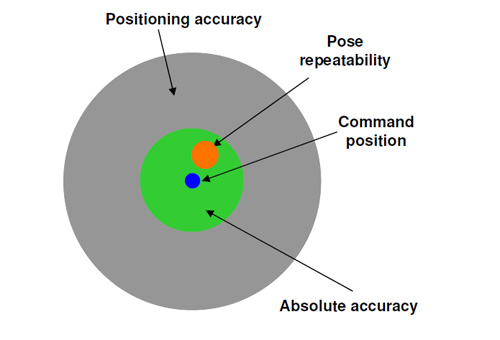
- 重複精度
這個因素取決於客戶端應用製程。重複精度為機械手臂完成例行性任務每一次都到達同一位置的能力。一般機械手臂的重複精度水準在 ±0.1mm 到 ±0.02mm 之間,甚至更精密。例如需要機械手臂組裝一個印刷電路板,就可能需要一個重複精度高的機械手臂。如果應用製程工序是比較粗糙,比如堆疊/ 上下料/ 沖壓件移載…..等,工業機械手臂也就不需要那麼精密。從另外一個角度來說,組裝工程的機械手臂精度的選型要求,也關係到組裝工程各環節尺寸和公差的累積和計算,比如:來料工件的定位精度,工件本身的在治具中的重複定位精度等。這項數據從 2D 方面以正負表示。由於機械手臂的運動重複經度不是單存 2D 線性運動,而是在立體空間 3D 運動,該參數的實際情況可以是在公差半徑內的圓形空間內任何位置。
- 防護等級
根據機械手臂使用環境,選擇達到一定的防護等級的標準。羅堎提供相同的機械手臂針對不同的場合不同的防護等級的產品系列。如果機械手臂在與生產食品相關的產品,醫藥、醫療器具,或易燃易爆的環境中工作時,IP 等級會有所不同。機械手臂經原廠測試過,出廠時皆為 IP64 的防水等級,而防水等級多以 IP 後跟隨兩個數字來表述,數字用來表示防護的等級如下。第一個數字表明設備防塵的程度,或者人在密封環境中免受危害的程度。第二個數字表明設備防水的程度。
|
